
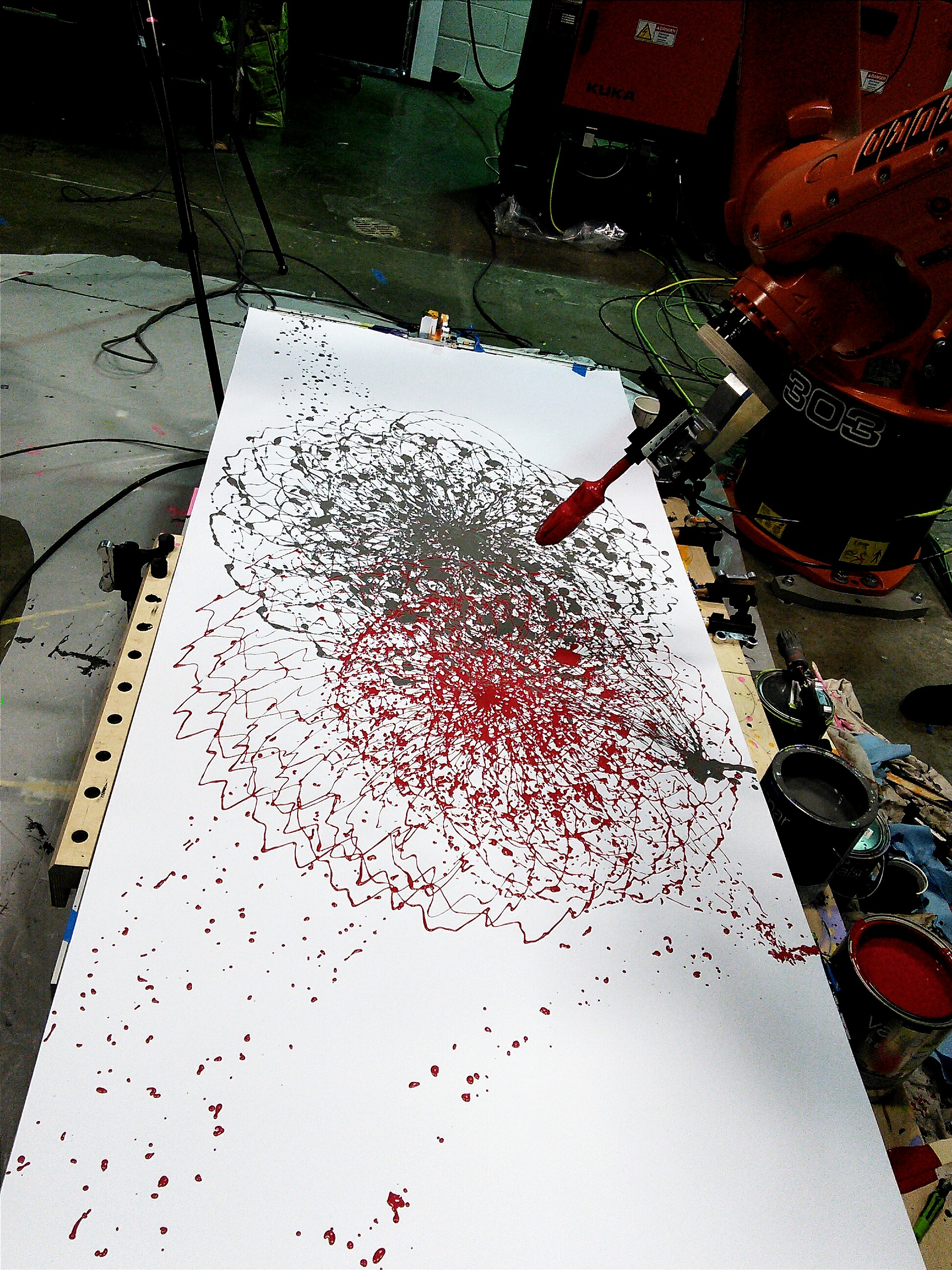
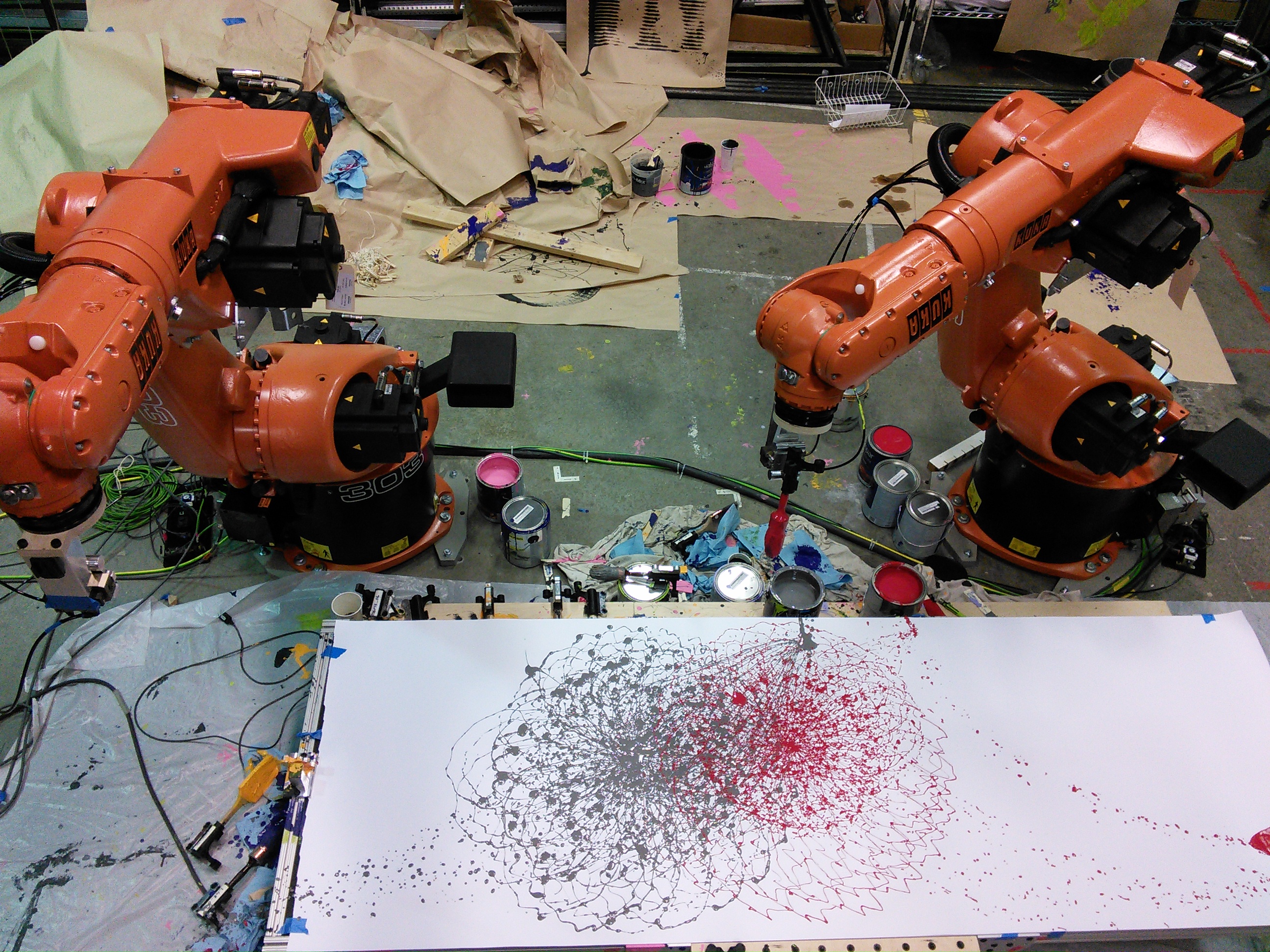
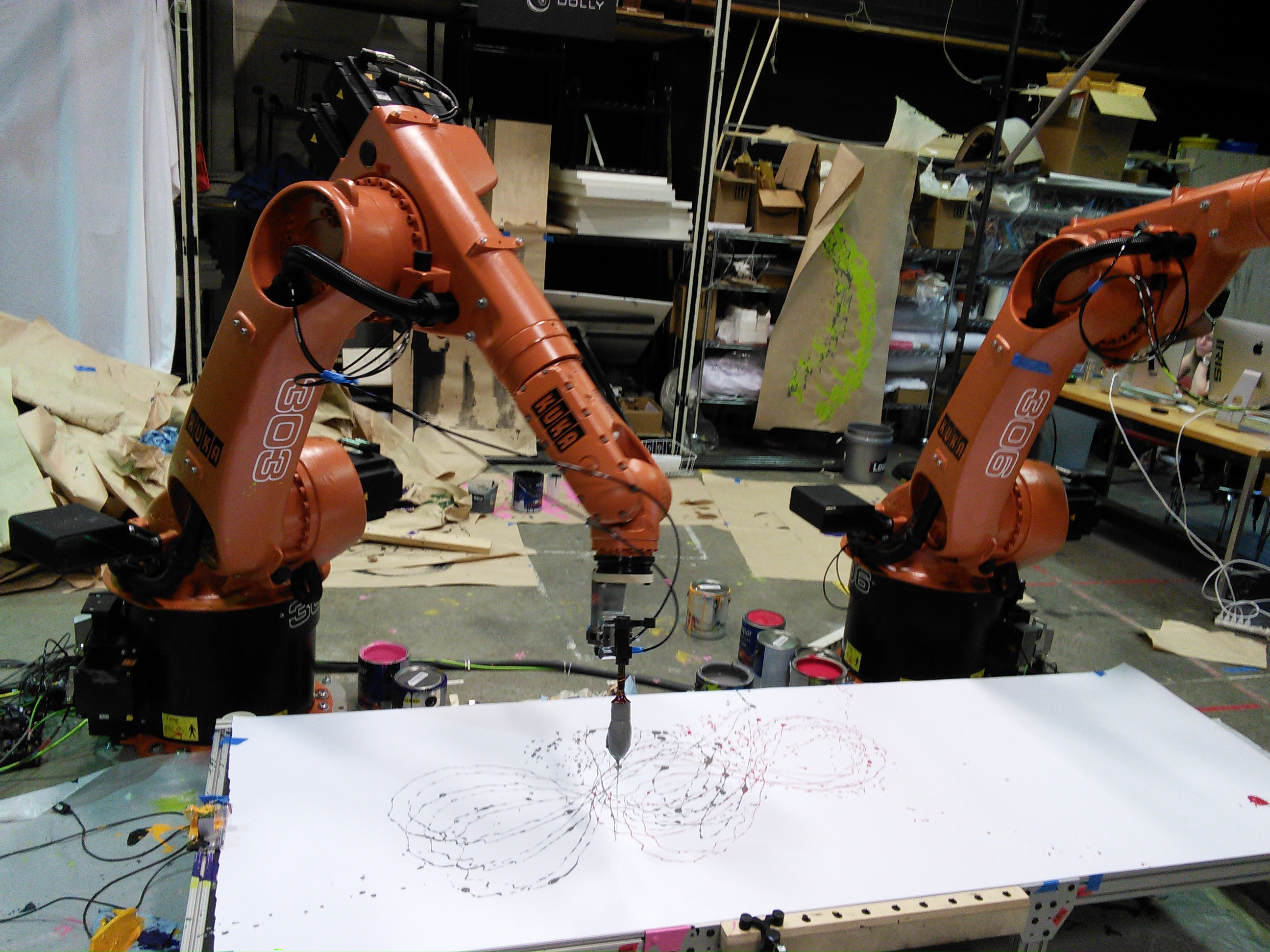
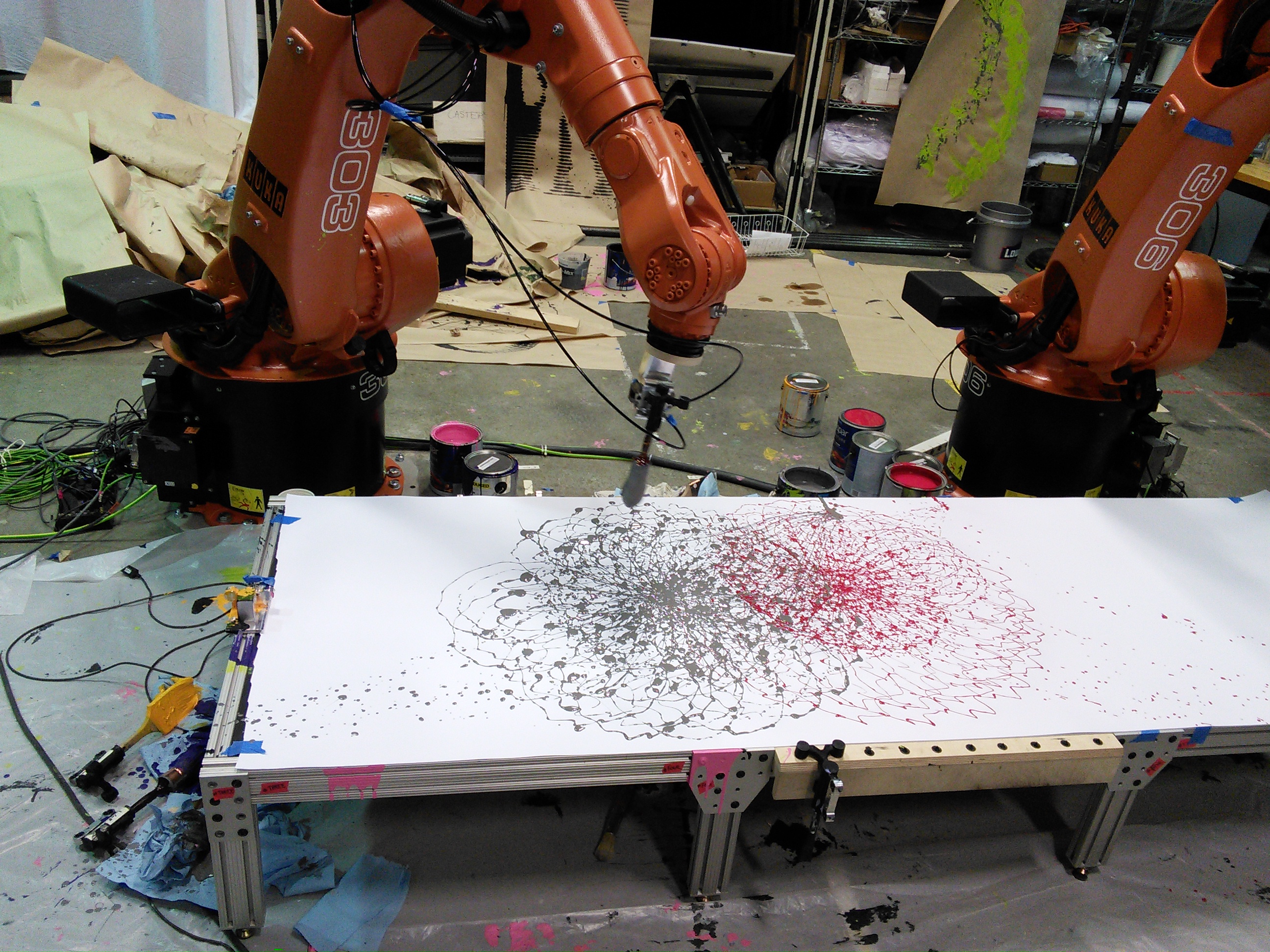
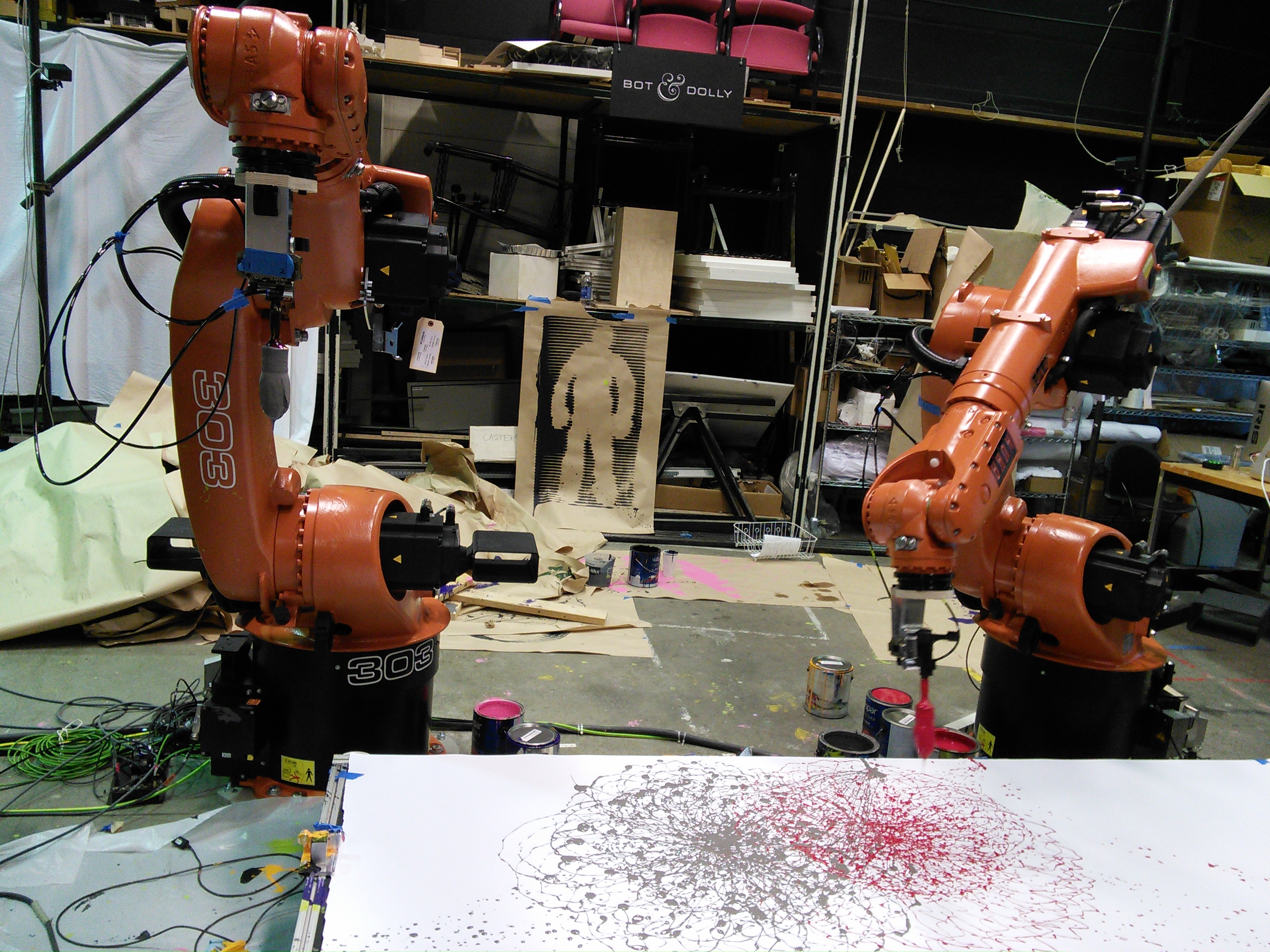
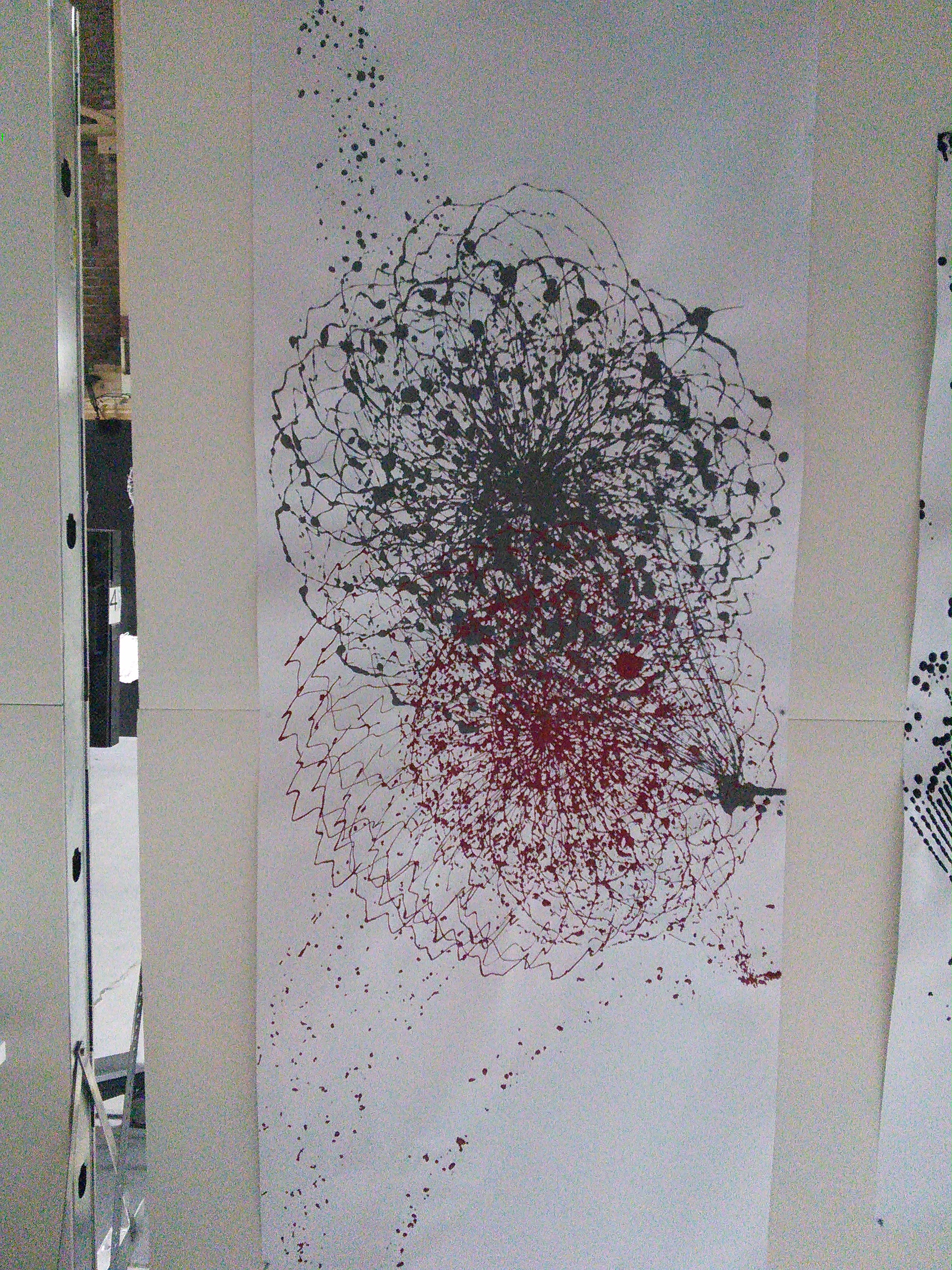
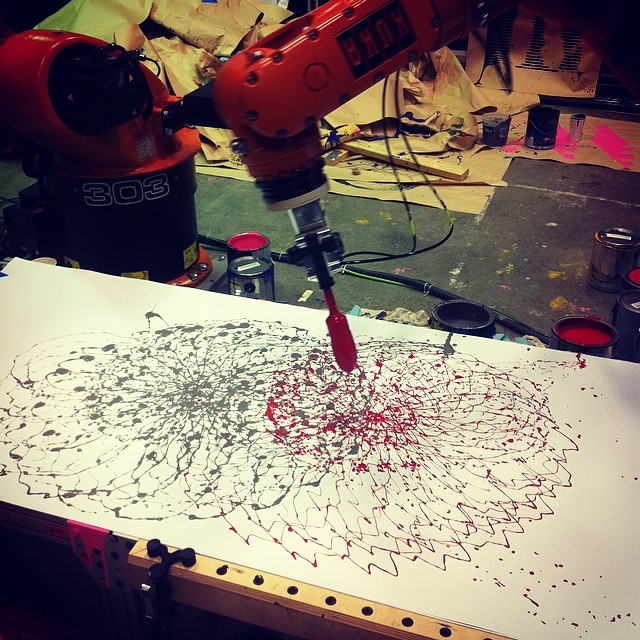
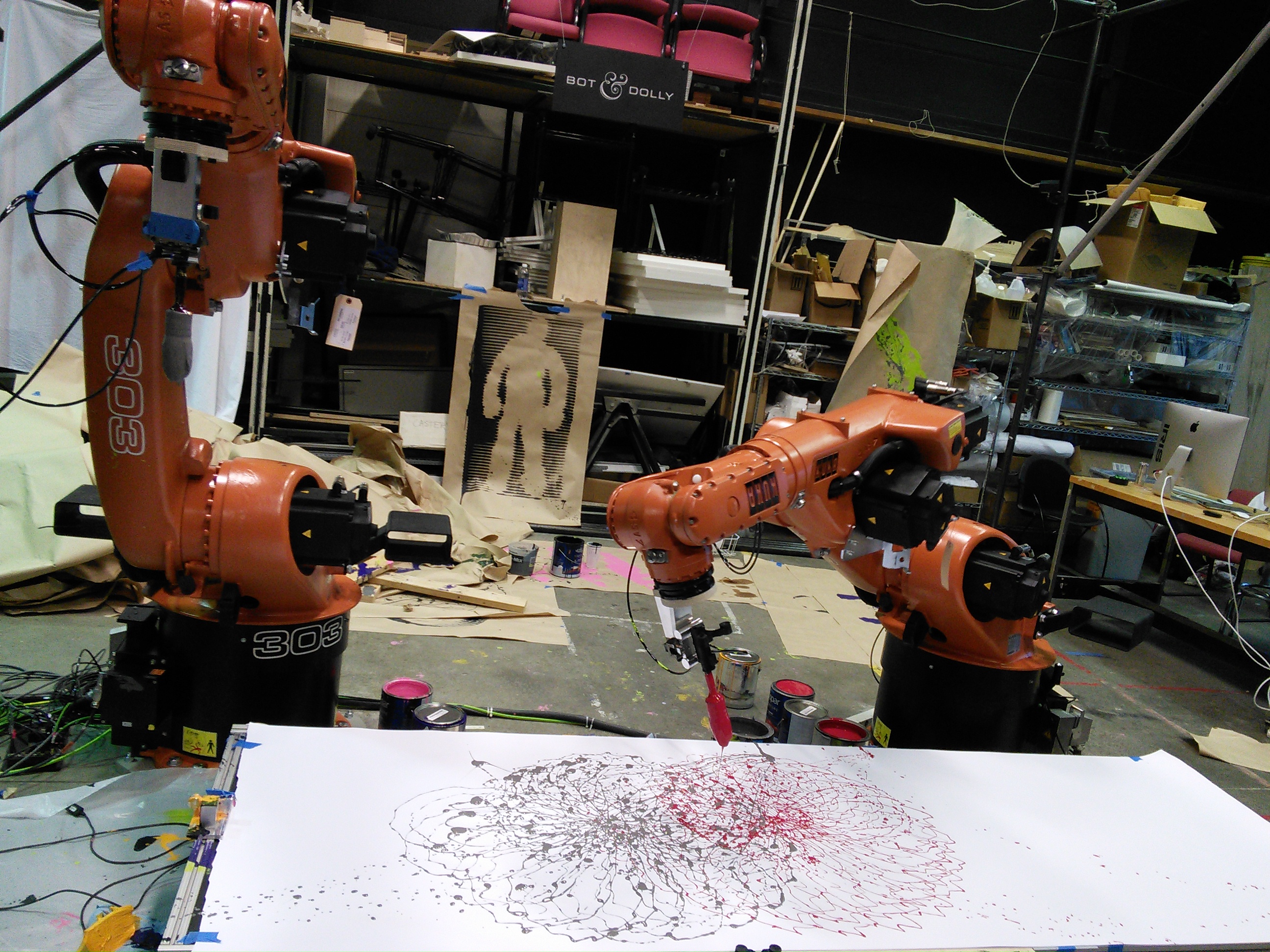
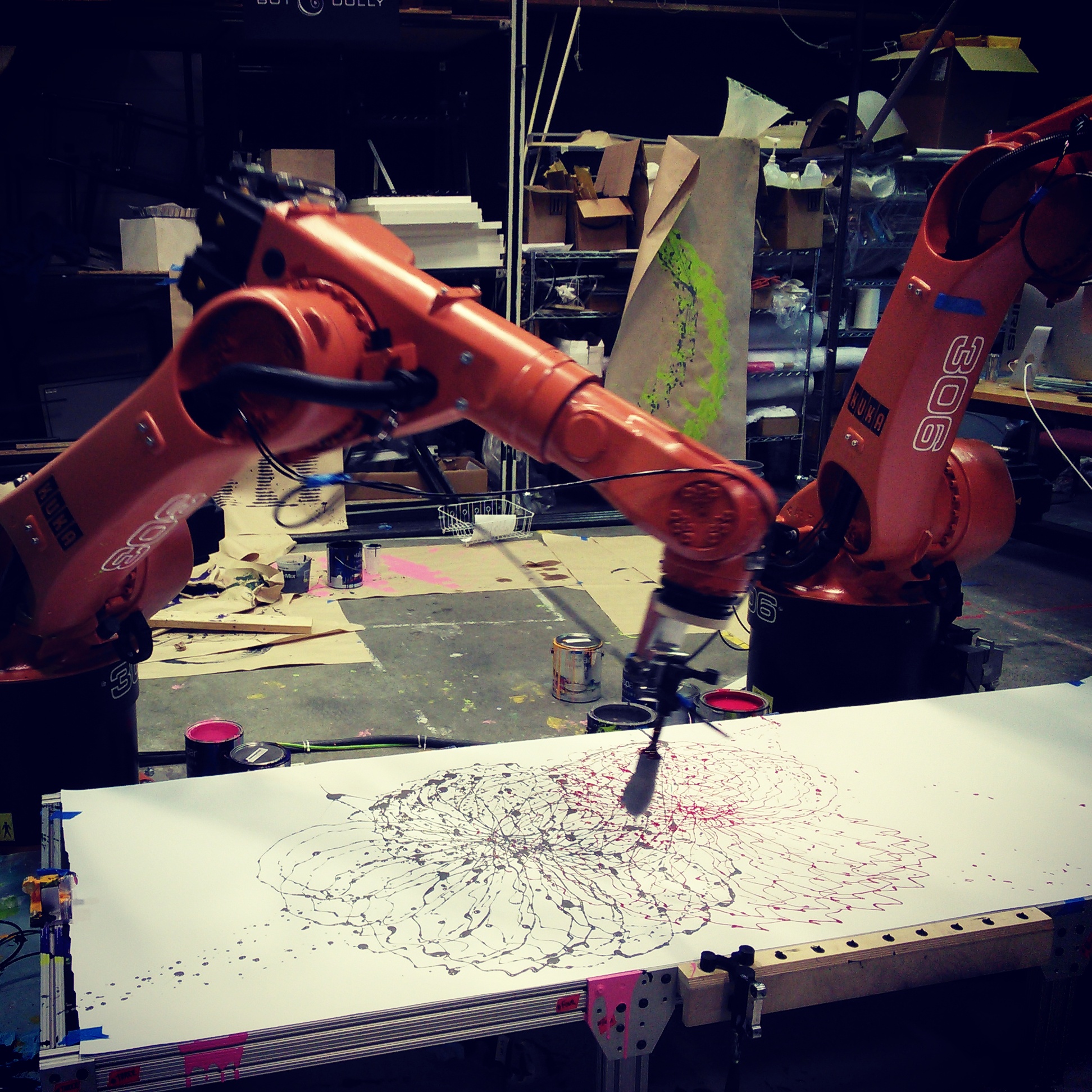
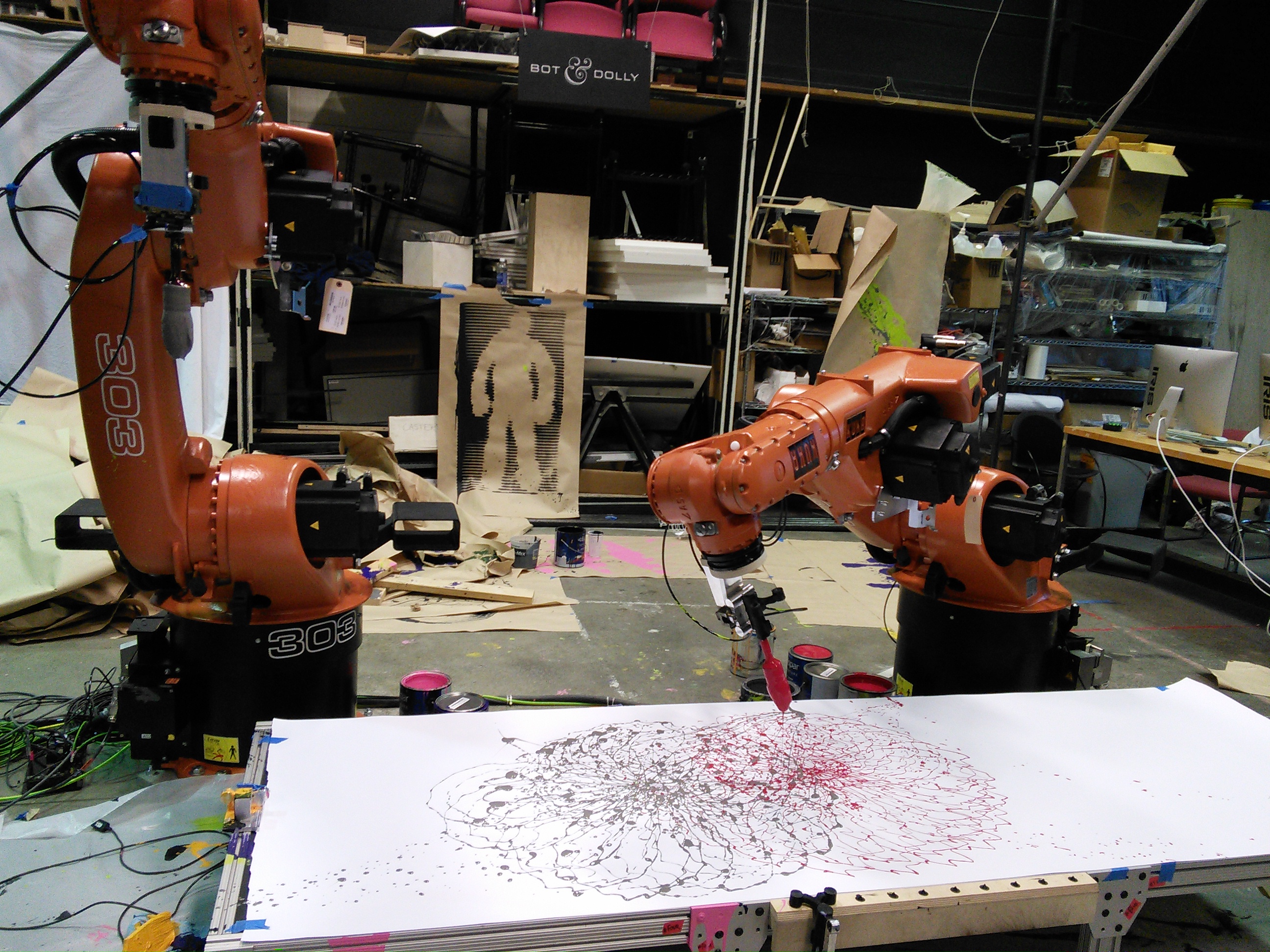
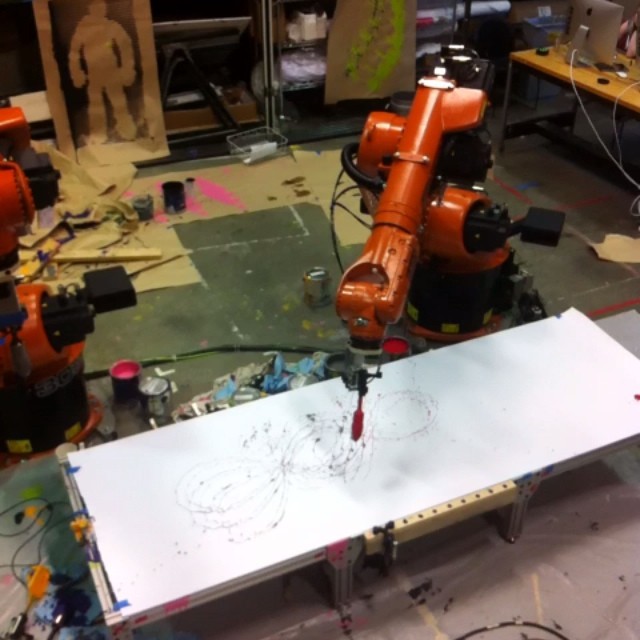
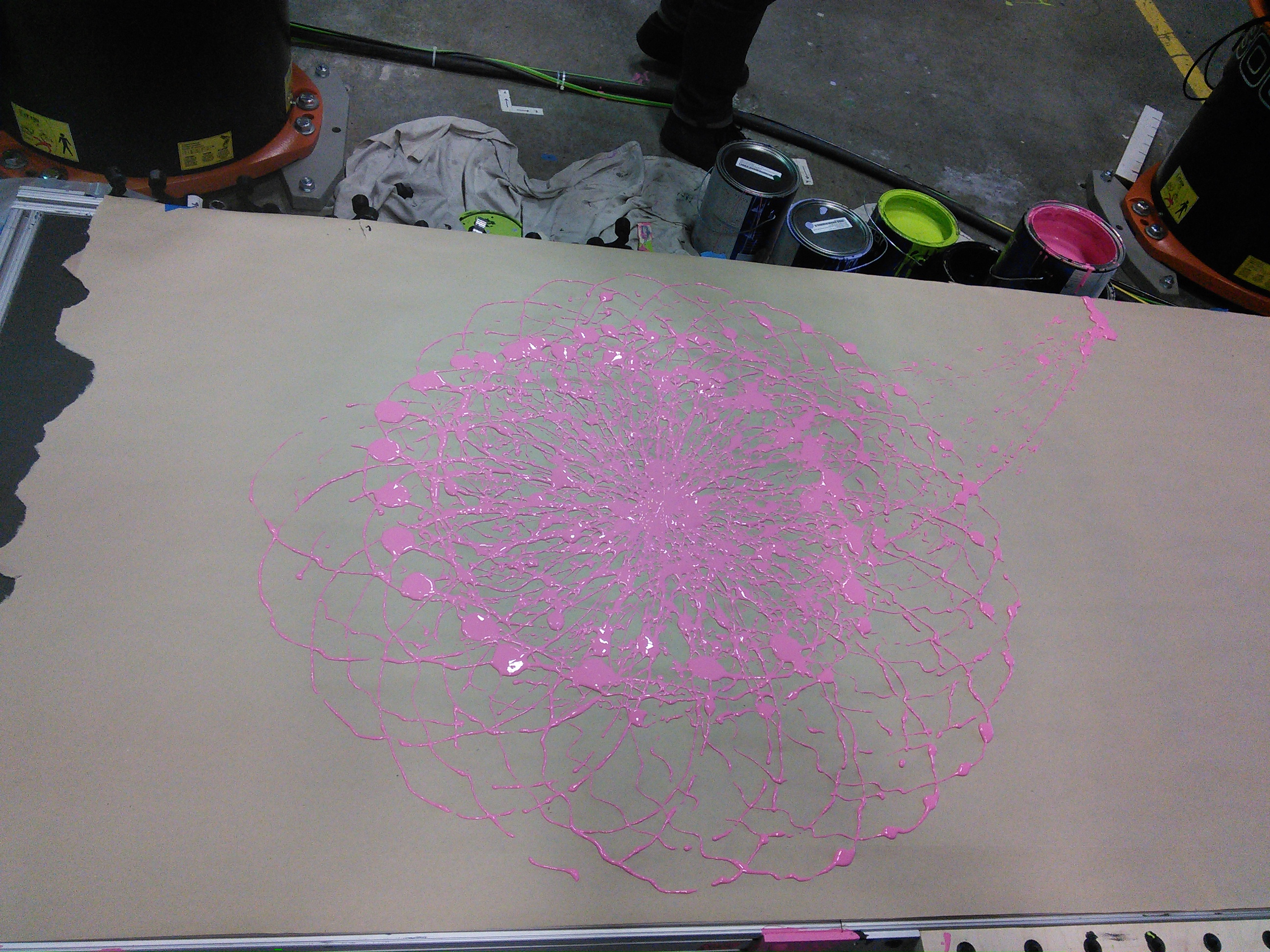
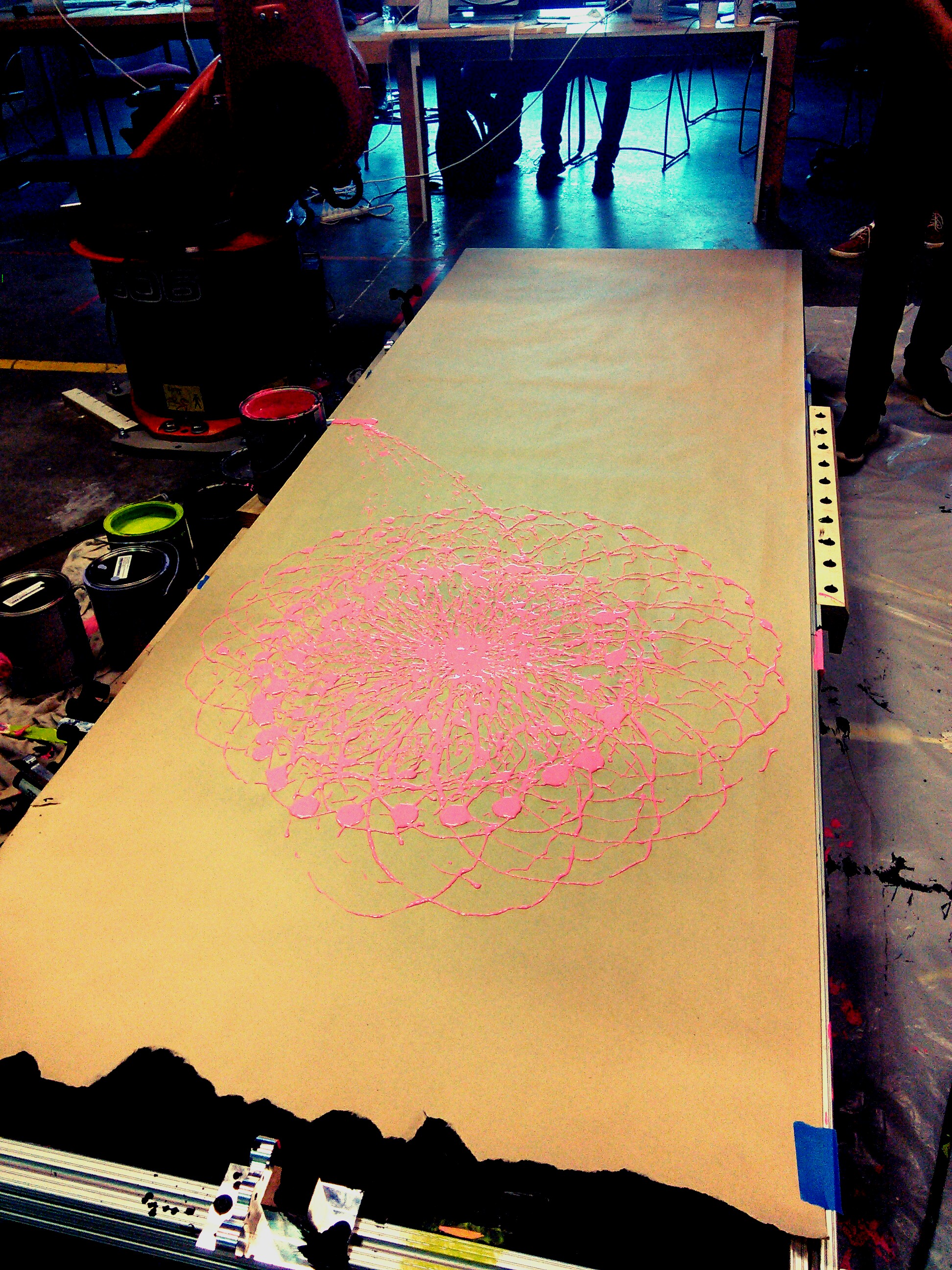
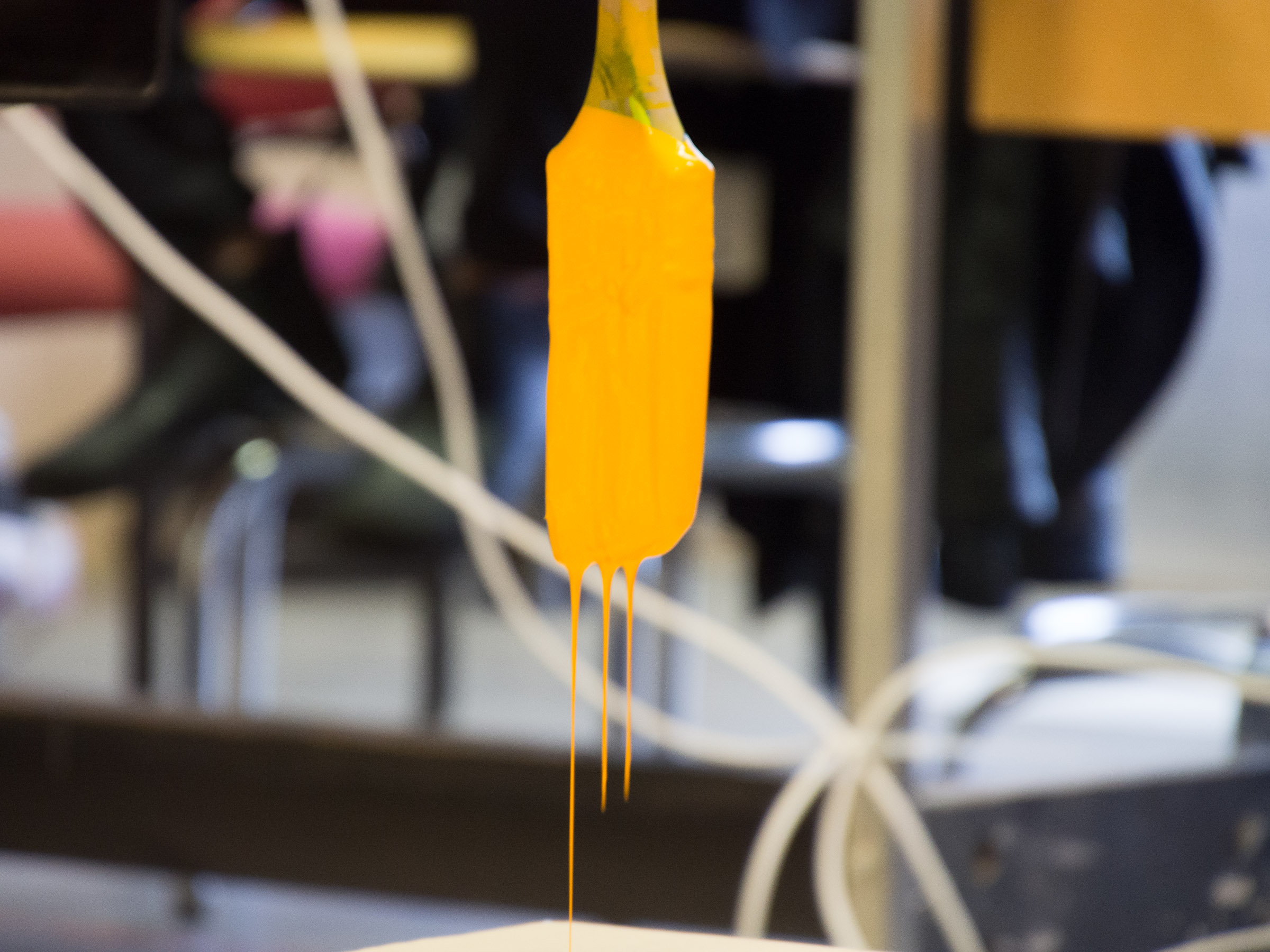
Craft class 4 robots is based on motion capture of me painting through different motion sensors. This information was then procedurally aggregated and translated into robotic motion parameters to drive the kinematics of 2 6-axis industrial robotic arms. Both robots worked collaboratively then for a synchronised painting of the generated design.
Bot & Dolly workshop, RobArch 2014
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">
 ">
">